|
|
| (5 intermediate revisions by the same user not shown) |
| Line 1: |
Line 1: |
| === Rappresentazione spazio temporale dei markers {{Rosso inizio}}da rivedere {{Rosso Fine}} ===
| | == Rappresentazione spazio temporale dei markers == |
| <p> | | <p> |
| '''<big>Condilo Laterotrusivo</big>''' | | '''<big>Condilo Laterotrusivo</big>''' |
| Line 17: |
Line 17: |
| !<small>Direzione <math>Y</math></small> | | !<small>Direzione <math>Y</math></small> |
| |- | | |- |
| | rowspan="9" |[[File:Figura 2 finale mod..jpg|center|400x400px|'''Figura 2:''' Marker dei punti nel ciclo masticatorio]]<small>'''Figura 5:''' Marker sovrapposti in Geogebra sul tracciato del condilo laterotrusivo</small> | | | rowspan="9" |[[File:Figura 2 finale mod..jpg|center|400x400px|'''Figura 2:''' Marker dei punti nel ciclo masticatorio]]<small>'''Figura 5:''' Markers sovrapposti in Geogebra sul tracciato del condilo laterotrusivo da modello Replicator di Lund e Gibbs.</small> |
| |2 | | |2 |
| |1.734 | | |1.734 |
| |Protrusiva | | |Protrusiva |
| |Parallela | | |Parallela. |
| |- | | |- |
| |3 | | |3 |
| Line 320: |
Line 320: |
| ===Discussione sulla rototraslazione condilare=== | | ===Discussione sulla rototraslazione condilare=== |
|
| |
|
| Il moto rototraslazionale dei condili è cruciale per comprendere la cinematica mandibolare. Se i condili ruotassero attorno a un punto fisso, i tracciati dei molari e degli incisivi sarebbero semplici archi di cerchio. Tuttavia, i movimenti reali includono sia rotazione che traslazione. | | Il moto rototraslazionale dei condili è cruciale per comprendere la cinematica mandibolare. Se i condili ruotassero attorno a un punto fisso, i tracciati dei molari e degli incisivi sarebbero semplici archi di cerchio. Tuttavia, i movimenti reali includono sia rotazione che traslazione.<ref>T Ogawa 1, K Koyano, T Suetsugu Correlation between inclination of occlusal plane and masticatory movement.. J Dent. 1998 Mar;26(2):105-12. |
| | |
| | doi: 10.1016/s0300-5712(97)00001-8. |
| | |
| | </ref><ref>W R Scott. Application of "cusp writer" findings to practical and theoretical occlusal problems. Part I.. I Prosthet Dent. 1976 Feb;35(2):211-21. PMID: 55483, DOI: 10.1016/0022-3913(76)90282-1</ref> |
|
| |
|
| Durante la laterotrusione, il condilo ipsilaterale combina rotazione attorno all’asse verticale e traslazione laterale, mentre il condilo mediotrusivo si muove principalmente in direzione mediale e anteriore, generando il "Tragitto orbitante". | | Durante la laterotrusione, il condilo ipsilaterale combina rotazione attorno all’asse verticale e traslazione laterale, mentre il condilo mediotrusivo si muove principalmente in direzione mediale e anteriore, generando il "Tragitto orbitante". |
| Line 344: |
Line 348: |
|
| |
|
| I tracciati dentali sono correlati ai movimenti dei condili e offrono preziose informazioni sulla cinematica mandibolare, per cui sarebbe auspicabile spendere qualche parola in più sulla velocità del moto masticatorio e la rappresentazione di questa cinematica mandibolare in un forma geometrico/matematica chiamata 'Conica'. | | I tracciati dentali sono correlati ai movimenti dei condili e offrono preziose informazioni sulla cinematica mandibolare, per cui sarebbe auspicabile spendere qualche parola in più sulla velocità del moto masticatorio e la rappresentazione di questa cinematica mandibolare in un forma geometrico/matematica chiamata 'Conica'. |
|
| |
| ===Velocità lineare ed angolare===
| |
| '''Fattori Considerati'''
| |
|
| |
| Partiamo dalla premessa logica che la cinematica masticatoria rappresentata nel capitolo viene rappresentta come un ciclo di apertura e chiusrua mandibolare prelevando lo stato spaziel e temporale nei marker convertiti successivamente in Geogebra ne punti 1-7 per ogni distretto condilare ed occlusale. Ciò, comunque, determina, come abbiamo dimostrato, distanza ed angoli diversi nei vari distretti del sistema con una specifica velocità lineare ed angolare tra loro ma sostanzialmente tutti i punti tornano al punto 1 ( massima Intercuspidazione) simultaneamente, Ciò indica una variabilitò delle velocità. Spiegamo ilprocesso:
| |
|
| |
| '''Sincronizzazione Temporale'''
| |
|
| |
| Entrambi i condili devono completare il movimento di ritorno nello stesso intervallo di tempo (<math>t_{tot}</math>), indipendentemente dalla distanza percorsa.
| |
|
| |
| * '''Differenze nelle Distanze:''' La distanza tra i punti 1-7 nel condilo laterotrusivo (<math>L_c</math>) è <math>d_{L_c} = 0.898 \, \text{mm}</math> mentre per il Condilo mediotrusivo (<math>M_c</math>): <math>d_{M_c} = 2.61 \, \text{mm}</math>. La velocità del <math>M_c</math> deve essere proporzionalmente maggiore per compensare la maggiore distanza percorsa nello stesso tempo.
| |
| '''Calcolo della Velocità Necessaria'''
| |
|
| |
| Assumiamo che il tempo di ritorno (<math>t_{tot}</math>) sia governato dal condilo <math>L_c</math>, la cui velocità media di ritorno è basata sul dato iniziale (<math>v_{L_c} = 224.5 \, \text{mm/s}</math>):
| |
|
| |
| <math>t_{tot} = \frac{d_{L_c}}{v_{L_c}} = \frac{0.898}{224.5} \approx 0.004 \, \text{s}</math>
| |
|
| |
| Per il condilo <math>M_c</math>, la velocità media necessaria (<math>v_{M_c}</math>) è:
| |
|
| |
| <math>v_{M_c} = \frac{d_{M_c}}{t_{tot}} = \frac{2.61}{0.004} \approx 652.5 \, \text{mm/s}</math>
| |
|
| |
| ==== Interpretazione Biomeccanica ====
| |
| Il condilo <math>M_c</math> deve operare con una velocità media di <math>652.5 \, \text{mm/s}</math>, quasi tripla rispetto a quella del <math>L_c</math> (<math>224.5 \, \text{mm/s}</math>). Questo incremento è necessario per sincronizzarsi con il condilo laterotrusivo, che percorre una distanza minore nello stesso intervallo di tempo.
| |
|
| |
| '''Ruolo Funzionale del <math>M_c</math>''': La velocità più alta del <math>M_c</math> riflette il suo ruolo dinamico e adattativo. Questo condilo deve compensare la maggiore distanza del tragitto e la necessità di stabilizzare il movimento mandibolare e mantenere un equilibrio biomeccanico.
| |
|
| |
| '''Efficienza del <math>L_c</math>''': Il condilo <math>L_c</math>, percorrendo una distanza più breve, opera a velocità inferiori, indicando una maggiore stabilità durante i movimenti masticatori laterali.
| |
|
| |
| In conclusioni la maggiore distanza percorsa dal <math>M_c</math> richiede un incremento significativo della velocità di ritorno, raggiungendo <math>652.5 \, \text{mm/s}</math>, per sincronizzarsi con il condilo <math>L_c</math>. Questo fenomeno è un chiaro esempio di adattamento biomeccanico, dove la mandibola bilancia le differenze di distanza e velocità tra i due condili per garantire una chiusura armonica e simultanea.
| |
|
| |
|
| ===Rappresentazione in una 'Conica'=== | | ===Rappresentazione in una 'Conica'=== |
| Line 378: |
Line 353: |
|
| |
|
| In sintesi, i tracciati dei molari e degli incisivi assumono forme ellittiche complesse, poiché il centro di rotazione condilare si sposta continuamente. Questo modello aiuta a comprendere meglio la complessità dei movimenti mandibolari. | | In sintesi, i tracciati dei molari e degli incisivi assumono forme ellittiche complesse, poiché il centro di rotazione condilare si sposta continuamente. Questo modello aiuta a comprendere meglio la complessità dei movimenti mandibolari. |
|
| |
| ----
| |
| ----
| |
|
| |
| == Introduzione ==
| |
|
| |
| === Rappresentazione spazio-temporale dei markers ===
| |
|
| |
| '''Condilo Laterotrusivo'''
| |
|
| |
| Questo paragrafo descrive il calcolo delle distanze e degli angoli tra segmenti in un piano 2D, applicati alla cinematica mandibolare. In particolare, si analizzano i movimenti articolari dei condili durante il ciclo masticatorio, rappresentati nella Figura 5 e nella Tabella 1.
| |
|
| |
| <center>
| |
| {| class="wikitable"
| |
| ! colspan="5" |Tabella 1
| |
| |-
| |
| ! Tracciato masticatorio
| |
| ! Markers
| |
| ! Distanza (mm)
| |
| ! Direzione
| |
| ! Direzione <math>Y</math>
| |
| |-
| |
| | rowspan="9" |[[File:Figura 2 finale mod..jpg|center|400x400px|'''Figura 2:''' Marker dei punti nel ciclo masticatorio]]<small>'''Figura 5:''' Marker sovrapposti in Geogebra sul tracciato del condilo laterotrusivo</small>
| |
| |2 |1.734 |Protrusiva |Parallela
| |
| |-
| |
| |3 |4.99 |Protrusiva |Lateralizzazione
| |
| |-
| |
| |4 |6.59 |Protrusiva |Lateralizzazione
| |
| |-
| |
| |5 |3.66 |Inversione |Inversione
| |
| |-
| |
| |6 |0.923 |Retrusiva |Lateralizzazione
| |
| |-
| |
| |7* |0.898 |Protrusiva |Medializzazione
| |
| |-
| |
| |8 |0.257 |Protrusiva |Medializzazione
| |
| |-
| |
| |}
| |
| </center>
| |
|
| |
| Dalla figura e dalla tabella emerge che il punto <math>7L_c</math> rappresenta l'inversione del moto condilare, con il passaggio verso un percorso mediale diretto alla massima intercuspidazione. La distanza tra il punto <math>7L_c</math> e <math>1L_c</math>, pari a circa <math>0.898 \, \text{mm}</math>, definisce il movimento di Bennett.
| |
|
| |
| La direzione angolare è stata calcolata come:
| |
| <math>\theta = 131.87^\circ</math> e <math>\theta' = 42^\circ</math>.
| |
|
| |
| Il calcolo dettagliato è riportato di seguito:
| |
| <math>
| |
| d = \sqrt{(-14.3)^2 + (16)^2} \approx 21.47 \text{ pixel}
| |
| </math>
| |
| Convertito in mm:
| |
| <math>
| |
| 21.47 \times 0.04184 \approx 0.898 \, \text{mm}
| |
| </math>
| |
| Angolo:
| |
| <math>
| |
| \theta = \arccos(-0.6665) \approx 131.87^\circ
| |
| </math>
| |
|
| |
| ---
| |
|
| |
| '''Molare Laterotrusivo'''
| |
|
| |
| Questo paragrafo analizza i movimenti articolari del molare ipsilaterale al condilo laterotrusivo, basandosi sul calcolo delle distanze tra punti e degli angoli tra vettori mediante trigonometria vettoriale (Figura 6 e Tabella 2).
| |
|
| |
| <center>
| |
| {| class="wikitable"
| |
| ! colspan="5" |Tabella 2
| |
| |-
| |
| ! Tracciato masticatorio
| |
| ! Markers
| |
| ! Distanza (mm)
| |
| ! Direzione <math>X</math>
| |
| ! Direzione dinamica <math>Y</math>
| |
| |-
| |
| | rowspan="8" |[[File:Figura 3 finale.jpg|center|399x399px|'''Figura 3:''' Distanze e direzioni del molare ipsilaterale alla laterotrusione]]'''Figura 6:''' <small>Marker grafici rilevati dal 'Replicator' durante la masticazione sul lato destro</small>
| |
| |2 |0.39 |Indietro |Lateralizzazione
| |
| |-
| |
| |3 |2.18 |Indietro |Lateralizzazione
| |
| |-
| |
| |4 |3.57 |Indietro |Lateralizzazione
| |
| |-
| |
| |5 |5.68 |Indietro |Lateralizzazione
| |
| |-
| |
| |6 |6.76 |Indietro |Inversione
| |
| |-
| |
| |7* |3.93 |Indietro |Medializzazione
| |
| |-
| |
| |8 |1.15 |Indietro |Medializzazione
| |
| |-
| |
| |}
| |
| </center>
| |
|
| |
| La distanza tra il punto <math>7L_m</math> e il punto iniziale <math>1L_m</math> è stata calcolata come circa <math>3.93 \,_\text{mm}</math>, con un angolo tra i vettori pari a <math>73^\circ</math>.
| |
|
| |
| <math>
| |
| \theta = \arccos \left( \frac{\vec{AB} \cdot \vec{AC}}{|\vec{AB}| |\vec{AC}|} \right) \approx 73.02^\circ
| |
| </math>
| |
|
| |
| ---
| |
|
| |
| '''Condilo Mediotrusivo'''
| |
|
| |
| L’analisi del moto cinematico mandibolare nel molare mediotrusivo evidenzia un progressivo aumento dell’angolo di direzione rispetto al molare laterotrusivo (<math>73^\circ</math>) e all’incisivo (<math>85^\circ</math>), fino al massimo valore rilevato nel condilo (<math>180^\circ</math>).
| |
|
| |
| L'angolo è calcolato come:
| |
| <math>
| |
| \theta = \arccos(-0.971) \approx 166^\circ
| |
| </math>
| |
| Sottraendo da <math>180^\circ</math>, si ottiene l’'''Angolo di Bennett''' di <math>14^\circ</math>.
| |
|
| |
| ---
| |
|
| |
| === Discussione sulla rototraslazione condilare ===
| |
|
| |
| Il moto rototraslazionale dei condili è cruciale per comprendere la cinematica mandibolare. Se i condili ruotassero attorno a un punto fisso, i tracciati dei molari e degli incisivi sarebbero semplici archi di cerchio. Tuttavia, i movimenti reali includono sia rotazione che traslazione.
| |
|
| |
| La rototraslazione del condilo laterotrusivo può essere rappresentata come:
| |
|
| |
| <math>
| |
| x_m = x_{m0} \cos(\theta) - y_{m0} \sin(\theta) + T_x
| |
| </math>
| |
| <math>
| |
| y_m = x_{m0} \sin(\theta) + y_{m0} \cos(\theta)
| |
| </math>
| |
|
| |
| Man mano che il condilo si muove, le coordinate <math>(x_m, y_m)</math> descrivono una traiettoria ellittica proiettata su un piano 2D.
| |
|
| |
| ---
| |
|
| |
| === Velocità lineare ed angolare ===
| |
|
| |
| Poiché tutti i punti tornano simultaneamente alla massima intercuspidazione, esiste una variabilità delle velocità nei diversi distretti:
| |
|
| |
| * Distanza percorsa dal condilo laterotrusivo: <math>d_{L_c} = 0.898 \text{ mm}</math>.
| |
| * Distanza percorsa dal condilo mediotrusivo: <math>d_{M_c} = 2.61 \text{ mm}</math>.
| |
|
| |
| Calcolo della velocità del condilo mediotrusivo:
| |
|
| |
| <math>
| |
| v_{M_c} = \frac{d_{M_c}}{t_{tot}} = \frac{2.61}{0.004} \approx
| |
Rappresentazione spazio temporale dei markers
Condilo Laterotrusivo
Questo paragrafo descrive il calcolo delle distanze e degli angoli tra segmenti in un piano 2D, applicati alla cinematica mandibolare. In particolare, si analizzano i movimenti articolari dei condili durante il ciclo masticatorio, rappresentati nella Figura 5 e nella Tabella 1.
| Tabella 1
|
| Tracciato masticatorio
|
Markers
|
Distanza (mm)
|
Direzione
|
Direzione 
|
| Figura 5: Markers sovrapposti in Geogebra sul tracciato del condilo laterotrusivo da modello Replicator di Lund e Gibbs.
|
2
|
1.734
|
Protrusiva
|
Parallela.
|
| 3
|
4.99
|
Protrusiva
|
Lateralizzazione
|
| 4
|
6.59
|
Protrusiva
|
Lateralizzazione
|
| 5
|
3.66
|
Inversione
|
Inversione
|
| 6
|
0.923
|
Retrusiva
|
Lateralizzazione
|
| 7*
|
0.898
|
Protrusiva
|
Medializzazione
|
| 8
|
0.257
|
Protrusiva
|
Medializzazione
|
|
|
Dalla figura e dalla tabella emerge che il punto  rappresenta l'inversione del moto condilare, con il passaggio verso un percorso mediale diretto alla massima intercuspidazione. La distanza tra il punto e
rappresenta l'inversione del moto condilare, con il passaggio verso un percorso mediale diretto alla massima intercuspidazione. La distanza tra il punto e  , pari a circa
, pari a circa  , definisce il movimento di Bennett.
, definisce il movimento di Bennett.
La direzione angolare è stata calcolata come:
 e
e  .
.
Per approfondire, il calcolo dettagliato è riportato di seguito:  Calcolo dettagliato: distanza tra
Calcolo dettagliato: distanza tra  e
e  , distanza euclidea
, distanza euclidea  , convertita in mm come
, convertita in mm come  , angolo
, angolo  .
.
Molare Laterotrusivo
Questo paragrafo analizza i movimenti articolari del molare ipsilaterale al condilo laterotrusivo, basandosi sul calcolo delle distanze tra punti e degli angoli tra vettori mediante trigonometria vettoriale (Figura 6 e Tabella 2).
| Tabella 2
|
| Tracciato masticatorio
|
Markers
|
Distanza (mm)
|
Direzione 
|
Direzione dinamica
|
| Figura 6: Marker grafici rilevati dal 'Replicator' durante la masticazione sul lato destro
|
2
|
0.39
|
Indietro
|
Lateralizzazione
|
| 3
|
2.18
|
Indietro
|
Lateralizzazione
|
| 4
|
3.57
|
Indietro
|
Lateralizzazione
|
| 5
|
5.68
|
Indietro
|
Lateralizzazione
|
| 6
|
6.76
|
Indietro
|
Inversione
|
| 7*
|
3.93
|
Indietro
|
Medializzazione
|
| 8
|
1.15
|
Indietro
|
Medializzazione
|
|
|
Osservando la figura e la tabella, si evidenziano le distanze e le direzioni dei punti marcati. In particolare, la distanza tra il punto  e il punto iniziale
e il punto iniziale  è stata calcolata come circa
è stata calcolata come circa  , con un angolo tra i vettori pari a
, con un angolo tra i vettori pari a  . Calcolo dettagliato:
1. Definizione dei vettori:
. Calcolo dettagliato:
1. Definizione dei vettori:

 2. Magnitudine dei vettori:
2. Magnitudine dei vettori:

 3. Prodotto scalare:
3. Prodotto scalare:
 4. Calcolo dell'angolo:
4. Calcolo dell'angolo:


Area Incisale
Questo paragrafo analizza i movimenti articolari dell’incisivo sul lato lavorante. Utilizzando le coordinate dei punti  ,
,  e
e  in uno spazio 2D, sono calcolate le distanze lineari e l’angolo tra i segmenti che collegano questi punti.(Figura 7, tabella 3)
in uno spazio 2D, sono calcolate le distanze lineari e l’angolo tra i segmenti che collegano questi punti.(Figura 7, tabella 3)
| Tabella 3
|
| Tracciato masticatorio
|
Markers
|
Distanza (mm)
|
Direzione
|
Direzione dinamica
|
| Figura 7: Markers grafici rilevati dal 'Replicator' durante la masticazione nell'area incisale sul lato destro.
|
2
|
0.69
|
Retrusiva
|
Lateralizzazione
|
| 3
|
2.30
|
Retrusiva
|
Lateralizzazione
|
| 4
|
4.61
|
Retrusiva
|
Lateralizzazione
|
| 5
|
7.58
|
Protrusiva
|
Lateralizzazione
|
| 6
|
8.54
|
Retrusiva
|
Inversione
|
| 7*
|
5.12
|
Retrusiva
|
Medializzazione
|
| 8
|
1.75
|
Retrusiva
|
Medializzazione
|
|
|
Per i tracciati dell’area incisale, la distanza tra i punti e è di  , con un angolo calcolato approssimativamente pari a
, con un angolo calcolato approssimativamente pari a  .
.
Per approfondire i calcoli, ecco la spiegazione dettagliata Calcolo dettagliato:
Coordinate dei punti:  ,
,  ,
,  .
Vettori:
.
Vettori:
 ,
,
 .
Norme:
.
Norme:
 ,
,
 .
Prodotto scalare:
.
Prodotto scalare:
 .
Coseno dell’angolo:
.
Coseno dell’angolo:
 .
Angolo:
.
Angolo:
 .
.
Molare mediotrusivo
| Tabella 4
|
| Tracciato mediotrusivo molare
|
Markers
|
Distanza (mm)
|
Direzione
|
Direzione dinamica
|
| Figura 8: Markers rilevati dal 'Replicator' durante la masticazione sul lato destro.
|
2
|
0.68
|
Retrusiva
|
Medializzazione
|
| 3
|
2.19
|
Retrusiva
|
Medializzazione
|
| 4
|
3.22
|
Retrusiva
|
Medializzazione
|
| 5
|
5.79
|
Protrusiva
|
Medializzazione
|
| 6
|
7.22
|
Protrusiva
|
Inversione
|
| 7*
|
4.81
|
Retrusiva
|
Lateralizzazione
|
| 8
|
1.18
|
Retrusiva
|
Lateralizzazione
|
|
|
La distanza lineare tra il punto  e
e  è stata calcolata come
è stata calcolata come  , con un angolo approssimativo di
, con un angolo approssimativo di  . Calcolo dettagliato:
Vettori:
. Calcolo dettagliato:
Vettori:

 .
Norme:
.
Norme:
 ,
,
 .
Prodotto scalare:
.
Prodotto scalare:
 .
Coseno:
.
Coseno:
 .
Angolo:
.
Angolo:
 .
.
Condilo Mediotrusivo
Il calcolo dell’angolo tra i segmenti  e
e  è fondamentale per analizzare i movimenti articolari nel sistema masticatorio. Questa analisi consente di comprendere come si muovono i segmenti articolari rispetto a un punto di riferimento. ( Figura 9, tabella 5)
è fondamentale per analizzare i movimenti articolari nel sistema masticatorio. Questa analisi consente di comprendere come si muovono i segmenti articolari rispetto a un punto di riferimento. ( Figura 9, tabella 5)
| Tabella 5
|
| Tracciato masticatorio
|
Markers
|
Distanza (mm)
|
Direzione
|
Direzione
|
| Figura 9: Markers rilevati dal 'Replicator' durante la masticazione sul lato destro nell'area incisale.
|
2 |
2.13 |
Protrusiva |
Medializzazione
|
| 3 |
6.19 |
Protrusiva |
Medializzazione
|
| 4 |
10.70 |
Protrusiva |
Medializzazione
|
| 5 |
11.09 |
Protrusiva |
Inversione
|
| 6 |
6.09 |
Protrusiva |
Lateralizzazione
|
| 7* |
2.61 |
Protrusiva |
Lateralizzazione
|
| 8 |
0.50 |
Protrusiva |
Lateralizzazione
|
|
|
La distanza tra il punto  e
e  è risultata
è risultata  , con un angolo calcolato di
, con un angolo calcolato di  . Sottraendo da
. Sottraendo da  , si ottiene un angolo di
, si ottiene un angolo di  , noto come Angolo di Bennett. Per il calcolo dettagliato Calcolo sintetico:
Vettore:
, noto come Angolo di Bennett. Per il calcolo dettagliato Calcolo sintetico:
Vettore:  ,
,  .
Prodotto scalare:
.
Prodotto scalare:  .
Norme:
.
Norme:  ,
,  .
.
 ,
,
 .
.
Discussione sulla rototraslazione condilare
Il moto rototraslazionale dei condili è cruciale per comprendere la cinematica mandibolare. Se i condili ruotassero attorno a un punto fisso, i tracciati dei molari e degli incisivi sarebbero semplici archi di cerchio. Tuttavia, i movimenti reali includono sia rotazione che traslazione.[1][2]
Durante la laterotrusione, il condilo ipsilaterale combina rotazione attorno all’asse verticale e traslazione laterale, mentre il condilo mediotrusivo si muove principalmente in direzione mediale e anteriore, generando il "Tragitto orbitante".
Descrizione matematica
La rototraslazione del condilo laterotrusivo può essere rappresentata come:


Dove:
 : posizione iniziale del molare ipsilaterale.
: posizione iniziale del molare ipsilaterale. : traslazione laterale lungo l’asse
: traslazione laterale lungo l’asse  .
. : posizione finale.
: posizione finale.
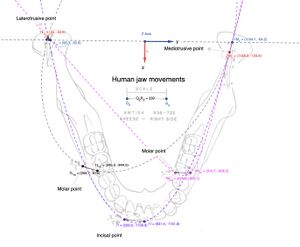
Figura 10a: Rappresentazione di una conica. Man mano che il condilo si muove, le coordinate descrivono una traiettoria ellittica proiettata su un piano 2D. Questo avviene perché il centro di rotazione istantaneo del condilo non è fisso ma si sposta continuamente.
Un fenomeno simile si osserva per il condilo mediotrusivo e gli incisivi, le cui traiettorie sono influenzate da traslazioni mediali e anteriori e da rotazioni attorno all’asse verticale. Questi tracciati non sono ellissi perfette, ma curve più complesse a causa delle variazioni nei movimenti condilari.
I tracciati dentali sono correlati ai movimenti dei condili e offrono preziose informazioni sulla cinematica mandibolare, per cui sarebbe auspicabile spendere qualche parola in più sulla velocità del moto masticatorio e la rappresentazione di questa cinematica mandibolare in un forma geometrico/matematica chiamata 'Conica'.
Rappresentazione in una 'Conica'
Un modello basato su una conica passante per cinque punti strategici aiuta a rappresentare meglio queste traiettorie, come illustrato nella figura 10a.
In sintesi, i tracciati dei molari e degli incisivi assumono forme ellittiche complesse, poiché il centro di rotazione condilare si sposta continuamente. Questo modello aiuta a comprendere meglio la complessità dei movimenti mandibolari.
- ↑ T Ogawa 1, K Koyano, T Suetsugu Correlation between inclination of occlusal plane and masticatory movement.. J Dent. 1998 Mar;26(2):105-12.
doi: 10.1016/s0300-5712(97)00001-8.
- ↑ W R Scott. Application of "cusp writer" findings to practical and theoretical occlusal problems. Part I.. I Prosthet Dent. 1976 Feb;35(2):211-21. PMID: 55483, DOI: 10.1016/0022-3913(76)90282-1






